Felix Dülmer

Ph.D. Candidate
I am a Ph.D. candidate in computer science working at the intersection of medical imaging, robotics, and physics-based simulation. My research focuses on advanced ultrasound imaging, with an emphasis on novel view synthesis, differentiable rendering, and robot-assisted acquisition. I am particularly interested in combining learning-based scene representations with physical image formation models to improve robustness, interpretability, and clinical relevance.
My work is conducted at the Technical University of Munich under the supervision of Prof. Nassir Navab, with affiliations to the Chair for Computer Aided Medical Procedures and the Institute of Biological and Medical Imaging. My work has been published at international conferences in medical imaging and machine learning.
I am currently a visiting researcher at Stanford University, specifically in the Ultrasound Imaging and Instrumentation Lab under Prof. Jeremy Dahl, where I work on differentiable ultrasound modeling and continuous representations for speed-of-sound estimation.
- CV: Download (PDF)
- Location: Munich, Germany
- Email: felix.duelmer@tum.de
Publications
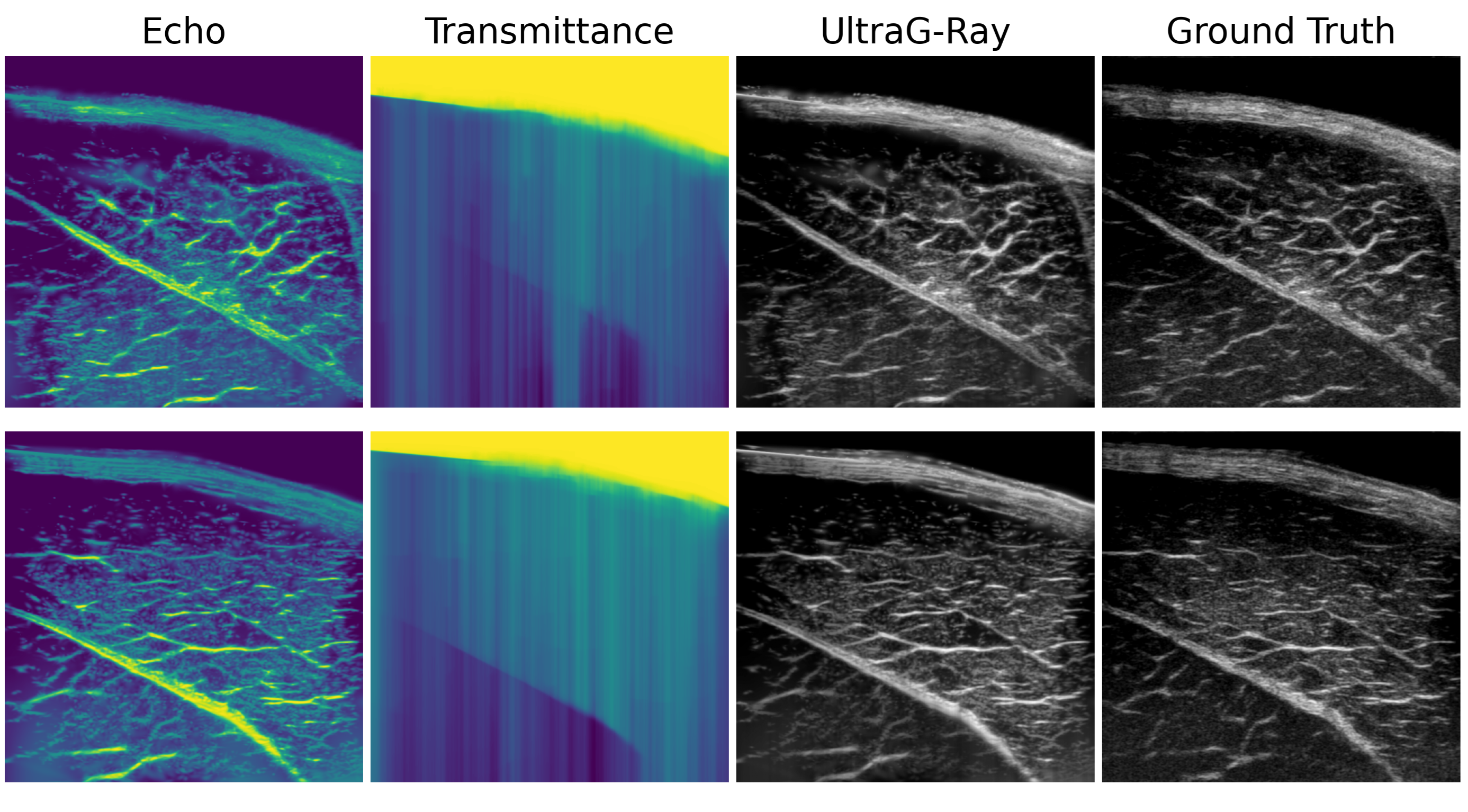
UltraG-Ray: Physics-Based Gaussian Ray Casting for Novel Ultrasound View Synthesis
MIDL 2026 (Accepted)
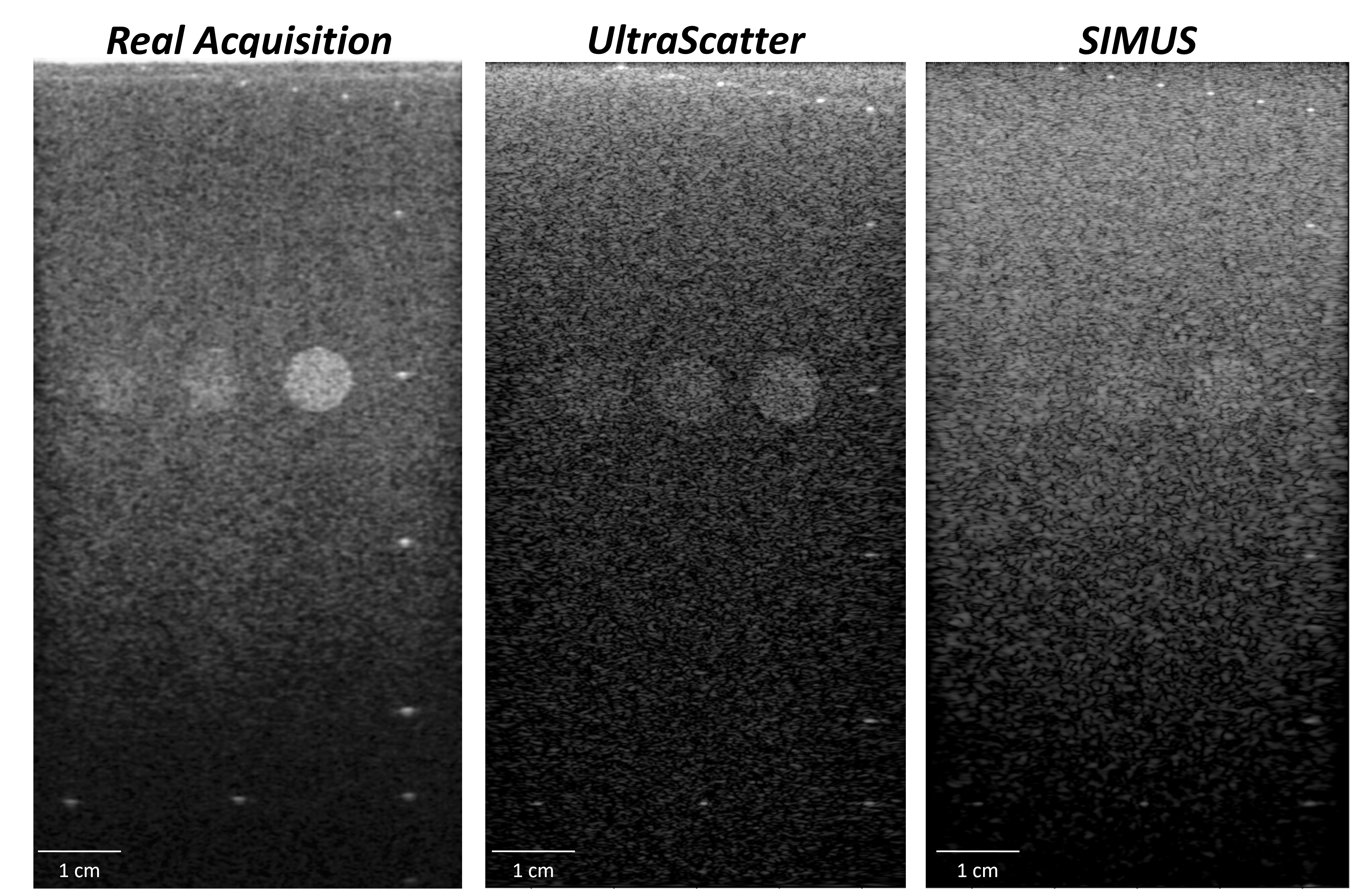
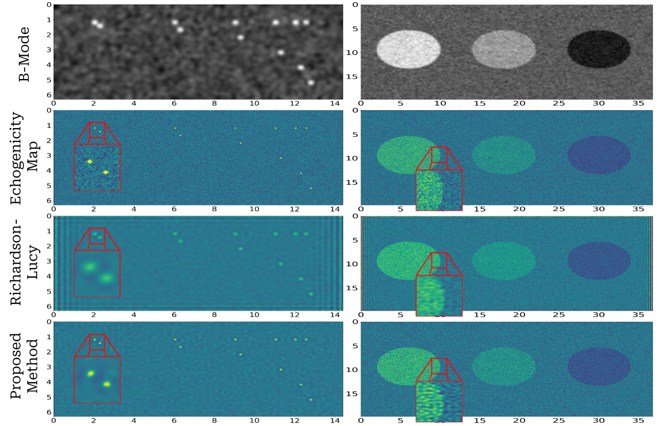
UltraScatter: Ray-Based Simulation of Ultrasound Scattering
IEEE IUS 2025 (Utrecht, Netherlands) · arXiv:2510.10612
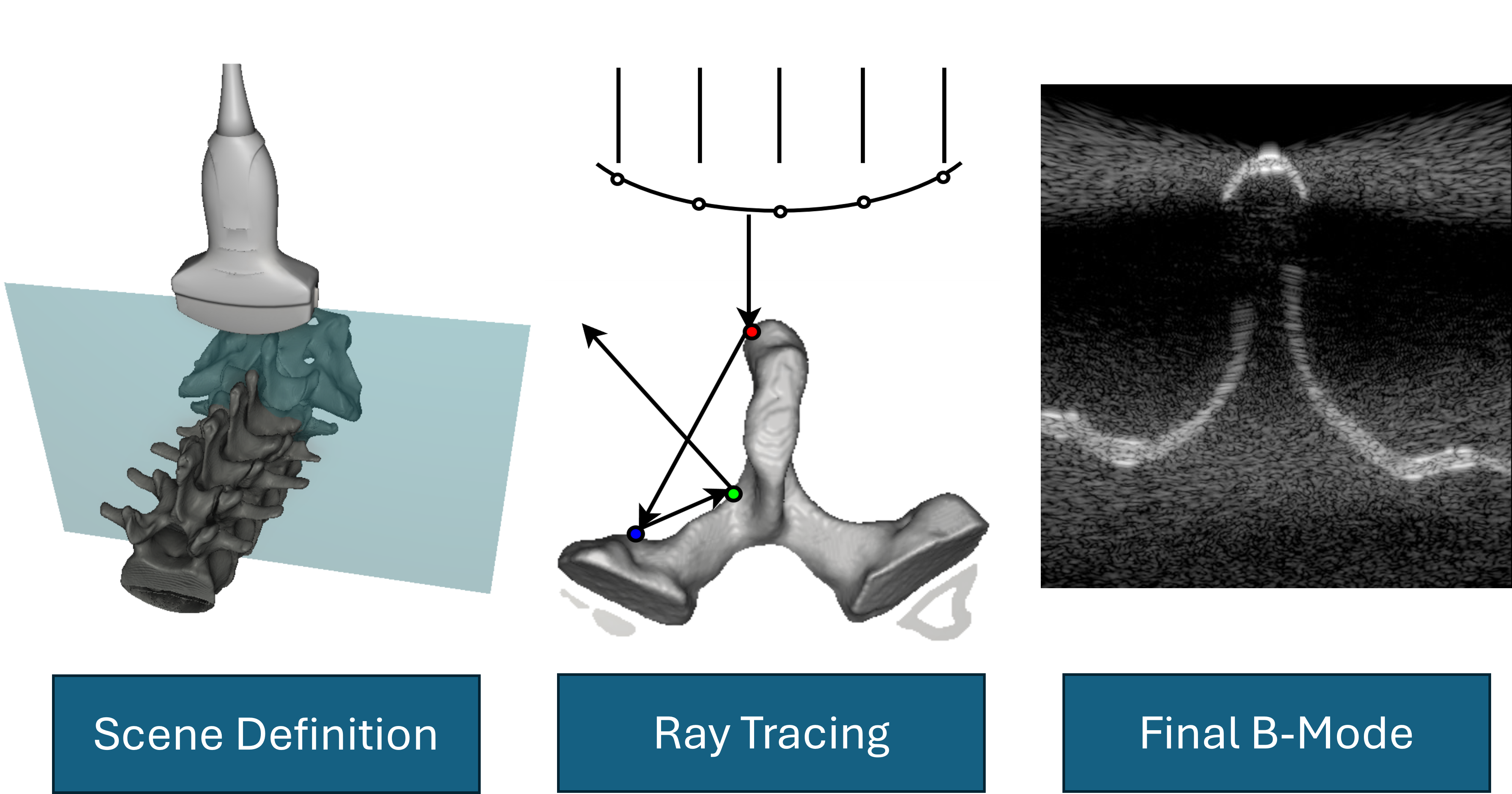
UltraRay: Introducing Full-Path Ray Tracing in Physics-Based Ultrasound Simulation
MICCAI 2025 · arXiv:2501.05828
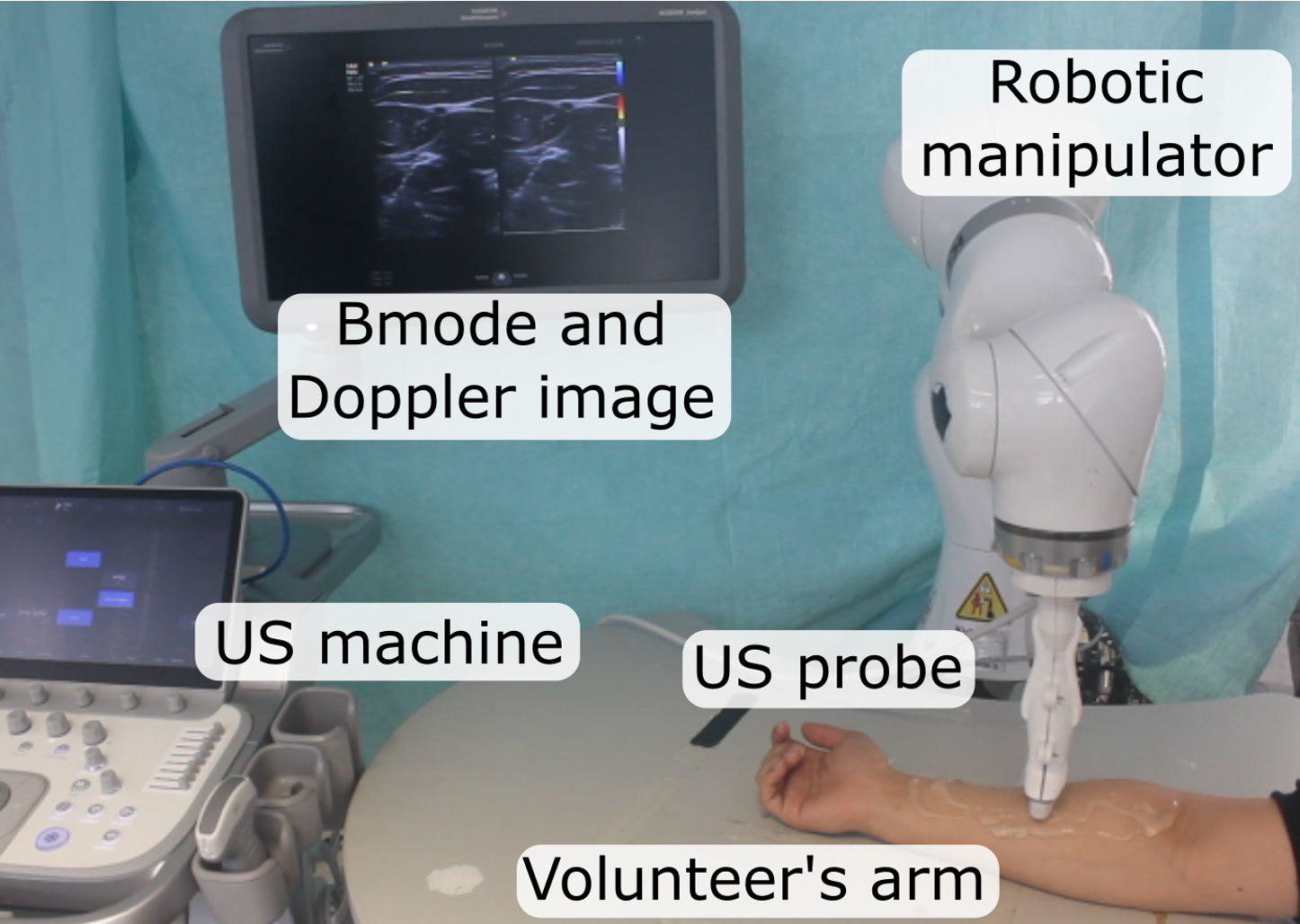
Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives
Annual Review of Control, Robotics, and Autonomous Systems (2024)
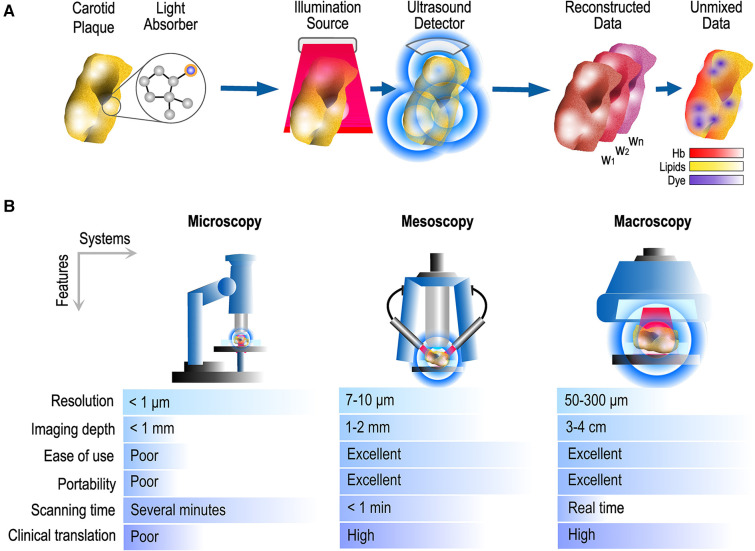
Optoacoustic biomarkers of lipids, hemorrhage and inflammation in carotid atherosclerosis
Frontiers in Cardiovascular Medicine (2023)
Experience
Visiting Researcher
03/2026 – 05/2026

 Stanford University, Ultrasound Imaging and Instrumentation Lab (Prof. Jeremy Dahl), Stanford, CA, USA
Stanford University, Ultrasound Imaging and Instrumentation Lab (Prof. Jeremy Dahl), Stanford, CA, USA
- Working on differentiable ultrasound modeling for physically grounded image formation.
- Working on continuous representations for speed-of-sound estimation.
Internship / Working Student — Mobile Software Developer
04/2021 – 12/2022
 Workerbase GmbH, Munich, Germany
Workerbase GmbH, Munich, Germany
- Developed and maintained two cross-platform industrial mobile applications deployed to several thousand factory workers
- Worked with Android (Kotlin, Java), iOS (Swift), and Flutter (Dart) for scalable cross-platform development
- Applied clean architecture, design patterns, and test-driven development
Research Assistant
09/2017 – 08/2020
 Technical University of Munich, Germany
Technical University of Munich, Germany
- Maintained and extended a driving simulator for automated driving research
- Onboarded and trained students on simulator usage and associated software platforms
- Contributed to prototype development for higher levels of vehicle autonomy
Education
Ph.D. in Computer Science
01/2023 – Present
Technical University of Munich, Germany
- Ph.D. research in medical imaging, robotics, and physics-based simulation
- Focus on ultrasound imaging, novel view synthesis, and differentiable rendering
- Development of learning-based scene representations with physical image formation models
- Robot-assisted ultrasound acquisition and analysis
M.Sc. Mechatronics and Robotics
10/2018 – 09/2022
Technical University of Munich, Germany
- Specialization in robot-assisted medical systems and image-guided interventions
- Development of robotic and software prototypes for medical applications
Exchange Semester (Postgraduate)
07/2019 – 12/2019
 Universidad de los Andes, Colombia
Universidad de los Andes, Colombia
- Coursework in big data analytics, deep learning, and numerical optimization
- Applied data-driven methods to large-scale and high-dimensional datasets
Term Paper — Cognitive Systems Lab
04/2019 – 06/2019
 University of Tsukuba, Japan
University of Tsukuba, Japan
- Designed and evaluated a tactile steering wheel for autonomous driving
- Conducted a controlled user study on a Japanese cohort with synchronized EEG recordings
B.Sc. Mechanical Engineering
10/2014 – 10/2018
Technical University of Munich, Germany
- Focus on autonomous driving systems and vehicle dynamics
- Engineering foundation in mechanics, control, and embedded systems
Contact
For any research or collaboration enquiries, please do not hesitate to contact me.
Location:
Munich, Germany
Email:
felix.duelmer@tum.de
Address:
IFL, Munich, Germany